超電導センサテクノロジー株式会社 SUSTEC(Superconducting Sensor Technology Corporation; SUSTEC)

Home > Technology > SQUID
High-temperature superconductivity and low-temperature superconductivity
The superconductivity, in which the electrical resistance becomes zero at extremely low temperatures, was discovered in 1911 by Kamerlingh Onnes of Leiden University in the Netherlands, who first succeeded in liquefying helium (-269 ℃ (4.2K)). Since then, it has become clear that a large number of materials show superconductivity at extremely low temperatures. Then, in 1987, Chu et al. Of the University of Houston discovered an yttrium-based cuprate superconductor that becomes superconducting at liquid nitrogen temperature (-196 ℃(77K)). For convenience, materials that become superconducting at liquid nitrogen temperature are called high-temperature superconductors (HTS), and superconductors that require liquid helium cooling are called low-temperature superconductors (LTS). We develop and provide high-performance magnetic sensors that utilize the superconducting phenomenon. It is called a superconducting QUantum Interference Device (SQUID) and is a high-sensitivity magnetic sensor. Our HTS-SQUID, which uses yttrium-based cuprate superconductors, can be cooled with liquid nitrogen, which is inexpensive and easy to handle, so it can be actively used outdoors for resource exploration and non-destructive inspection.
Principle of superconducting quantum interference device (SQUID)
In the superconducting state, the
electrical resistance becomes completely zero, and current flows
even when the voltage is zero. This current is called
superconducting current. Electrons (e-) are flowing in the
normal current that has electrical resistance and requires
voltage, but a pair of electrons (2e-) called a Cooper pair, are
flowing in the superconducting current. All Cooper pairs are in
the same energy state and have the property (phase) of a highly
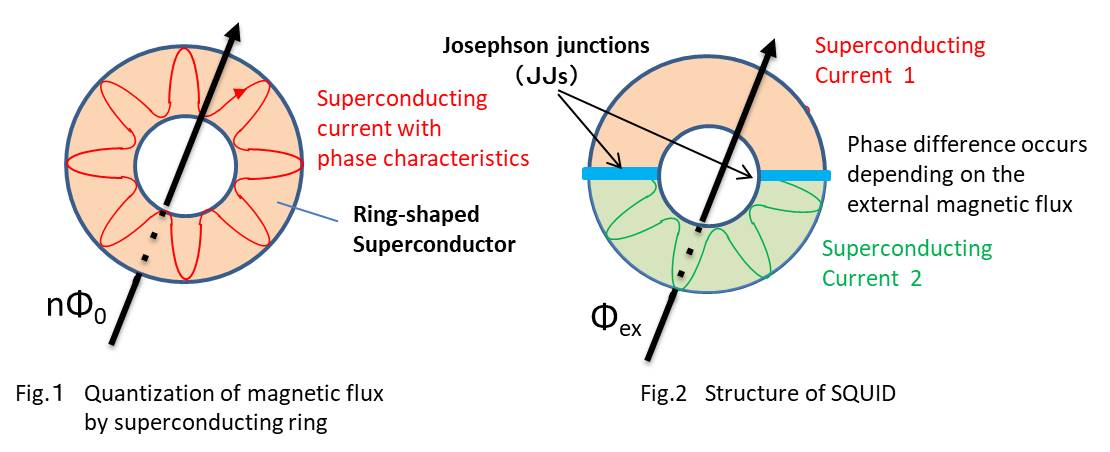
coherent wave. When the superconductor is made into a ring shape
(closed loop), the circular superconducting current is subject
to the condition that the phase matches when it makes one round.
This is because if the phases do not match, the current will
disappear and it will not exist. For this reason, only
discontinuous values are allowed. The magnetic flux
corresponding to the circular current becomes a discontinuous
value, which is called magnetic flux quantization (Fig. 1).
Specifically, inside all superconductors, the magnetic flux is
quantized to an integral multiple of the magnetic flux quantum Φ0
(2.07x10-15Wb).
The SQUID magnetic sensor has a structure in which a
ring-shaped superconductor is separated by two Josephson
junctions (JJ) as shown in Fig.2. The Josephson junction has a
structure in which two superconductors are weakly connected, and
only a small amount of superconducting current (about several
tens of μA) called Josephson current flows. Phase shifts are
allowed at the Josephson junction, and the external magnetic
flux (Φex) can take continuous values within the
SQUID ring. However, the phase difference of the superconducting
current at the Josephson junction changes in response to the
magnetic flux interlinking in the ring. If the phase difference
is large, the Josephson current decreases, and the phase
difference changes with the period of the magnetic flux quantum
Φ0.
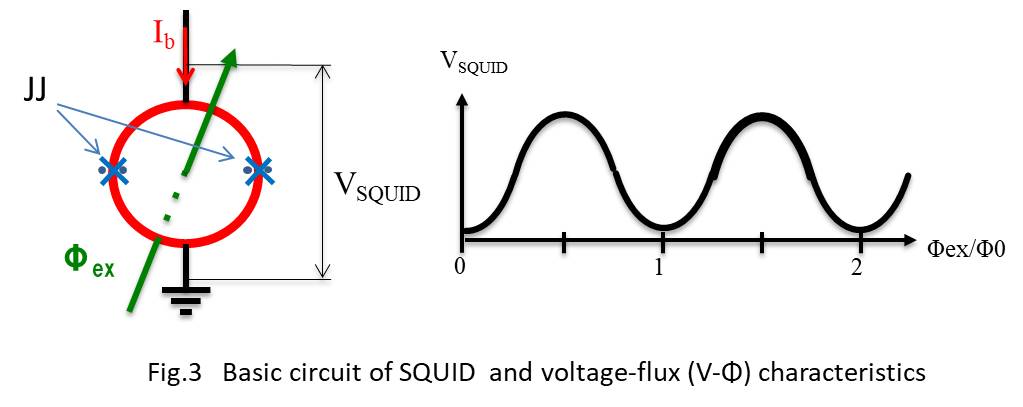
When a constant bias current (Ib) slightly larger
than the maximum Josephson current of SQUID is applied and the
voltage (VSQUID) generated in SQUID is measured with
respect to an external magnetic field, the voltage-magnetic flux
characteristics shown on the right can be obtained. When the
external magnetic flux is zero, the phase difference is the
smallest and the generated voltage is low. As the external
magnetic flux increases, the phase difference increases, and the
Josephson current that flows at zero voltage decreases, so the
voltage applied to SQUID increases. When the phase difference
becomes 180 ° or more, the Josephson current ratio starts to
increase as the next cycle approaches, and the voltage applied
to SQUID decreases. As a result, the voltage output changes
periodically (sine wave) with Φ0 as the period (Fig.
3). SQUID functions as a non-linear magnetic flux-voltage
conversion device.
Linearization of SQUID signal by magnetic flux feedback control
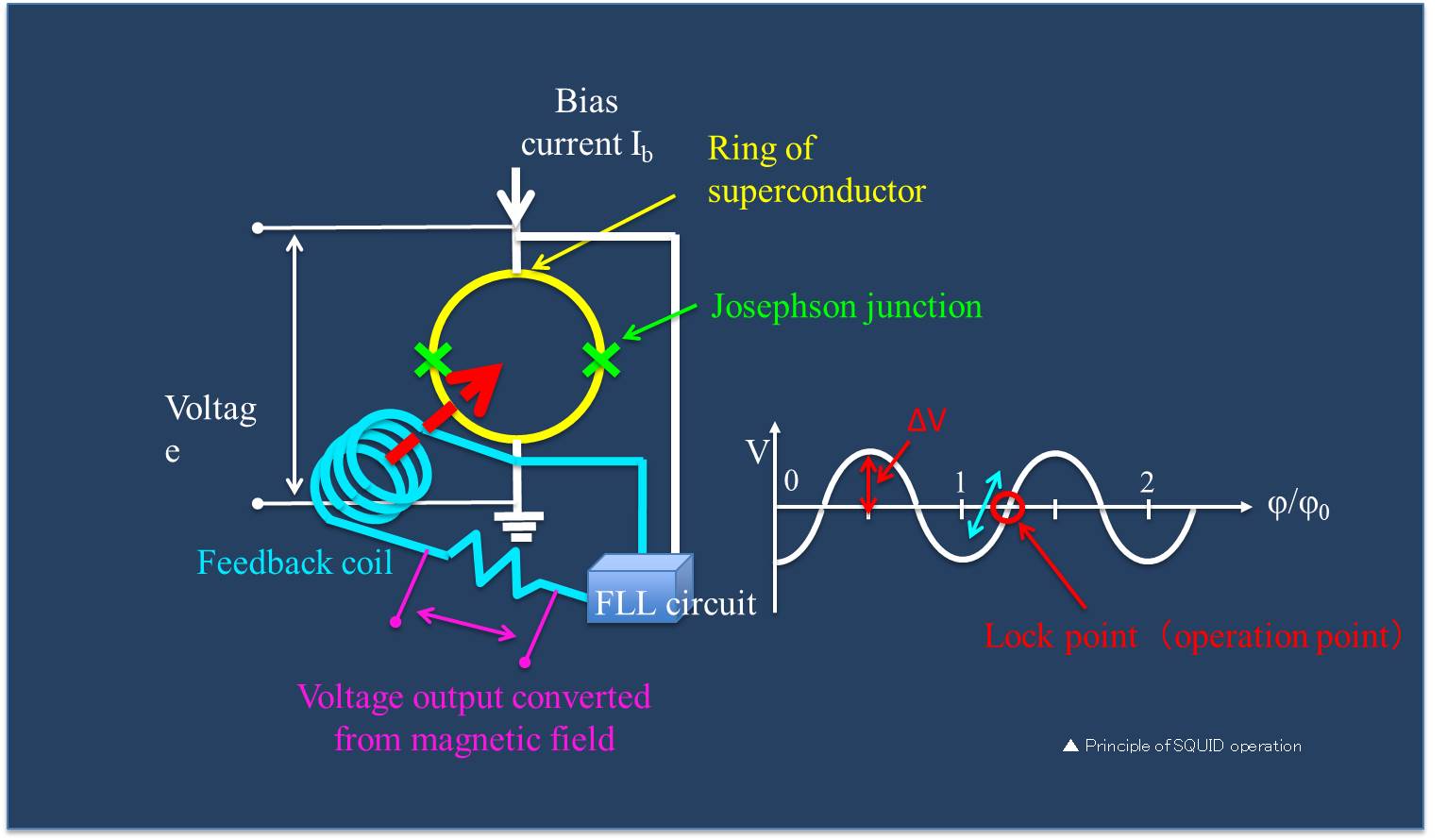
Since the SQUID has a non-linear output that changes periodically, the input signal (detected signal) cannot be extracted as it is. Therefore, using a control circuit called FLL (Flux Locked Loop) circuit, a magnetic field in the opposite direction is input to the SQUID so as to cancel the input signal. Specifically, as shown in the figure on the right, the operating point is the point where the output is 0V. This voltage is used to pass a current through the feedback coil so that a magnetic field that cancels the magnetic field is applied to SQUID. During the feedback operation, the relationship of external magnetic field equal to feedback magnetic field is established, so it is possible to obtain an output signal that is linear with respect to the input magnetic field by reading the current of the feedback coil. If sudden magnetic field changes occur, feedback will be delay and the operating point cannot be maintained. The maximum amount of change in the magnetic field per unit time that feedback control can follow is called the slew rate. The higher the slew rate, the higher the magnetic field resistance to disturbance, and stable operation is possible even under severe conditions. Our SQUID has the highest record of 10mT / s in HTS-SQUID.